د ویلډینګ روبوټ لړۍ


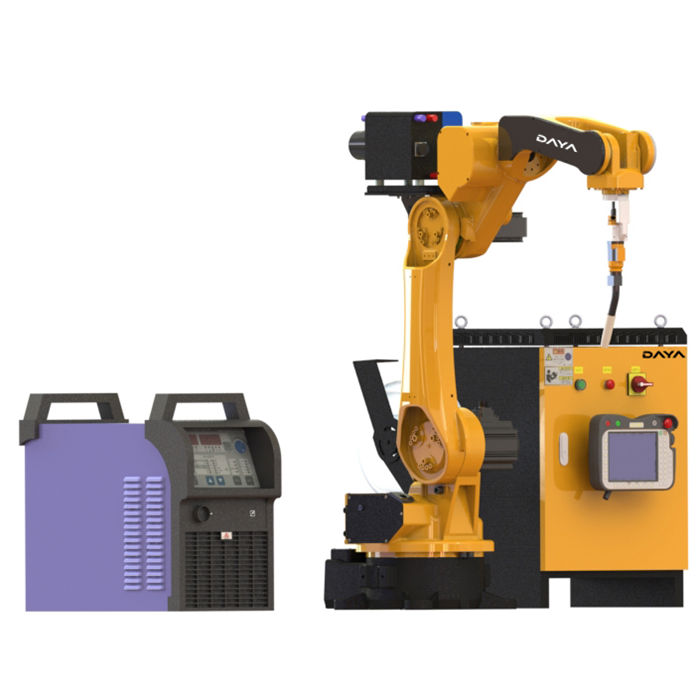

د ویلډینګ روبوټ

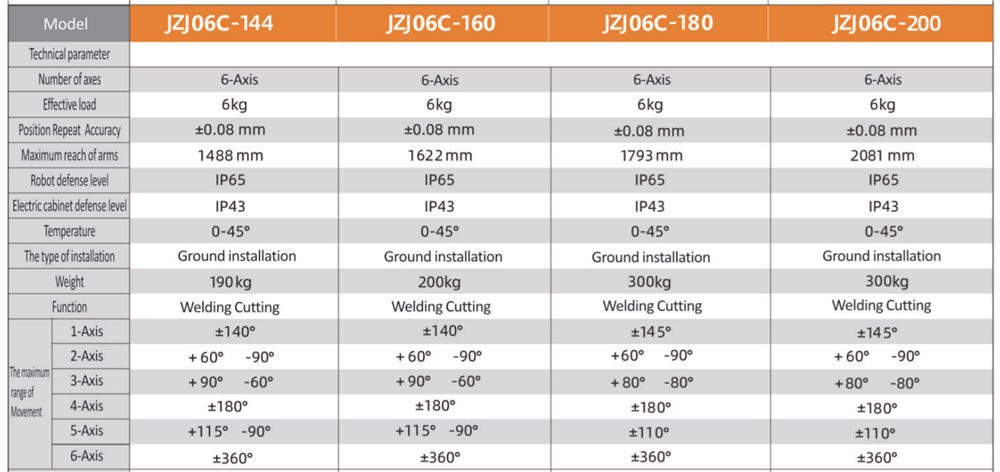
د ویلډینګ روبوټ لړۍ JZJ06C-180
د ویلډینګ روبوټ لړۍ JZJ06C-144

د ویلډینګ روبوټ لړۍ JZJ06C-160

د ویلډینګ روبوټ لړۍ JZJ06C-200
لنډه پیژندنه
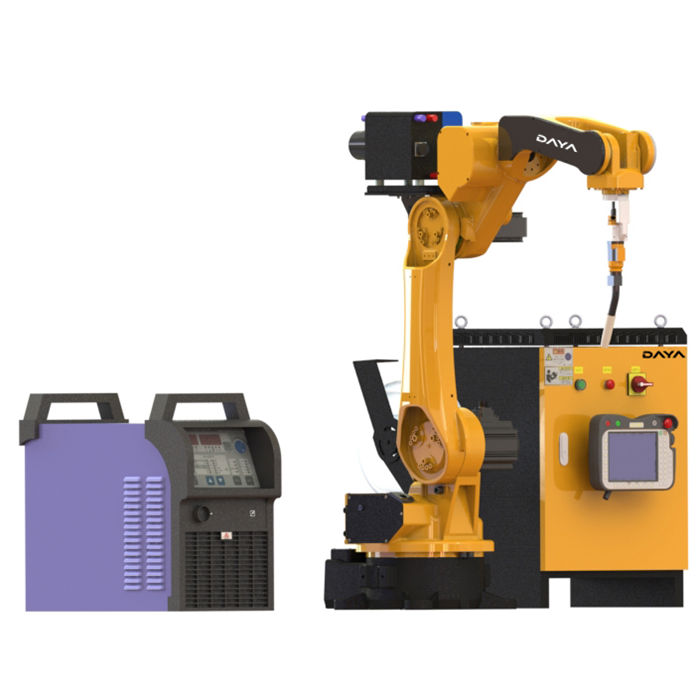
د ویلډینګ روبوټ یو صنعتي روبوټ دی چې په ویلډینګ کې بوخت دی (پشمول د قلمو او سپریدو). د معیاري کولو لپاره د نړیوال سازمان تعریف (ISO) چې صنعتي روبوټ د معیاري ویلډینګ روبوټ پورې اړه لري ، صنعتي روباټ یو څو اهداف لري ، د درې یا ډیرو برنامه وړ محورونو سره د تکرار وړ برنامه ایښودونکی ، کوم چې د صنعتي اتومات کولو په برخه کې کارول کیږي. د مختلف غوښتنلیکونو ته د تطبیق کولو لپاره ، د روبوټ وروستي محور میکانیکي انٹرفیس معمولا یو وصل کیدونکی فلج دی ، کوم چې د مختلف وسیلو یا پای اغیزو سره وصل کیدی شي. د ویلډینګ روبوټ د صنعتي روبوټ پای شینټ فلجج کې ویلډینګ ټونګ یا ویلډینګ (کټینګ) ټوپ نصب کول دي ، نو دا کولی شي ویلډینګ ، پرې کول یا تودوخې سپرې ترسره کړي.
د روبوټ ویلډینګ د میکانیک شوي برنامه کولو وسیلو (روبوټونو) کارول دي ، کوم چې د ویلډ ترسره کولو او برخه اداره کولو لخوا د ویلډینګ پروسه په بشپړ ډول اتومات کوي. پروسسونه لکه د ګاز فلزي آرک ویلډینګ ، پداسې حال کې چې ډیری وخت اتومات کیږي ، لازمي ډول د روباټ ویلډینګ سره مساوي ندي ، ځکه چې یو انسان آپریټر ځینې وختونه توکي ویلډ کولو ته چمتو کوي. د روبوټ ویلډینګ عموما د لوړ تولید غوښتنلیکونو کې د مقاومت ځای ویلډینګ او آرک ویلډینګ لپاره کارول کیږي ، لکه د موټرو صنعت.
د روبوټ ویلډینګ د روباټکس نسبتا نوی اپلیکیشن دی ، پداسې حال کې چې روبوټ د لومړي ځل لپاره د 1960 مو کلونو په جریان کې د متحده ایالاتو صنعت ته معرفي شو. په ویلډینګ کې د روبوټونو کارول تر 1980 پورې پای ته ونه رسیده ، کله چې د موټرو صنعت د سپټ ویلډینګ لپاره په پراخه کچه د روبوټونو کارول پیل کړل. له هغه وروسته ، په صنعت کې د کارول شوي روبوټونو شمیر او د دوی غوښتنلیکونو شمیر خورا وده کړې. په 2005 کې ، د شمالي امریکا په صنعت کې له 120،000 ډیر روبوټونه کارول شوي ، چې شاوخوا نیمایي یې د ویلډینګ لپاره دي. [1] وده اساسا د لوړ تجهیزاتو لګښتونو لخوا محدوده ده ، او پایله یې د لوړې تولید غوښتنلیکونو پورې محدودیت دی.
د روبوټ آرک ویلډینګ په دې وروستیو کې ګړندۍ وده پیل کړې ، او دمخه دا د 20 industrial صنعتي روبوټ غوښتنلیکونو امر کوي. د آرک ویلډینګ روبوټونو عمده برخې منیپولیټر یا میخانیکي واحد او کنټرولر دي ، کوم چې د روبوټ "مغز" په توګه کار کوي. مانیپولیټر هغه څه دي چې روبوټ حرکت کوي ، او د دې سیسټمونو ډیزاین کولی شي په ډیری عام ډولونو کې طبقه بندي شي لکه د SCARA او کارټیسین کوآرډینټ روبوټ چې د ماشین د وسلو مستقیم کولو لپاره مختلف همغږي سیسټمونه کاروي.
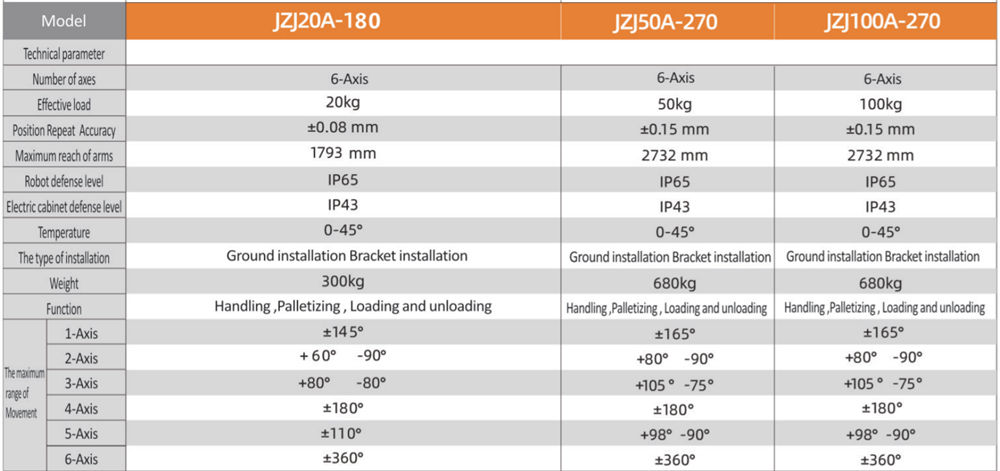
د ویلډینګ روبوټ لړۍ تخنیکي پیرامیټرې